The so-called image segmentation refers to dividing the image into a number of non-overlapping regions according to features such as grayscale, color, texture and shape, and making these features show similarity in the same region, and it is obvious in different regions. The difference.
1. Edge-based image segmentation methodEdges always appear as sudden changes in intensity and can be defined as discontinuities in the local characteristics of the image, such as mutations in grayscale, mutations in texture structures, and so on. Edges often mean the end of one area and the beginning of another. The detection of edges is often done by means of a spatial differential operator, by convolving its template with the image. There are always grayscale edges between two adjacent regions with different gray values, and this is the result of the discontinuity of the gray values, which can be detected using the first and second derivatives. In today's edge detection methods, there are mainly one differential, two differential and template operations. These edge detectors can achieve better results for less complex images such as sharper gray edges and less noise. However, it is not ideal for complex image edges, such as edge blurring, edge loss, and edge discontinuity. The presence of noise makes the effect of the derivative-based edge detection method significantly lower. In the case of large noise, the edge detection operator usually first smoothes the image appropriately, suppresses the noise, and then obtains the derivative or localizes the image. Fit, and replace the direct numerical derivative with the derivative of the fitted smooth function, such as the Canny operator. In future research, adaptive threshold selection for extracting initial edge points, selection of larger regions for image hierarchical segmentation, and how to identify important edges to remove false edges will be very important.
According to the characteristics of gray scale changes, common edges can be divided into step type, roof type and flange type.
There are many methods for edge detection, mainly the following:
1) The spatial differential operator, which is the traditional edge detection method. Such as Roberts operator, Prewitt operator and Sobel operator.
2) Fit the surface. The method fits a surface using some pixel values ​​in the current pixel neighborhood and then finds the gradient of this continuous surface at the current pixel.
3) Wavelet multi-scale edge detection.
4) Edge detection based on mathematical morphology.
Finally, the target area is determined by the contour (boundary) tracking of the image:
The contour (boundary) tracking of an image is closely related to edge detection because contour tracking essentially "walks" a circle along the outer edge of the image and then segments the target area.
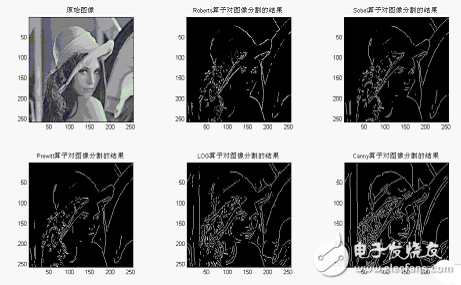
The following figure shows the results of grayscale Lena image segmentation using Roberts, Sobel, Prewitt, LOG, and Canny operators, respectively:
Dk Phase Motor Centrifugal Pump,A2 Phase Motor.Driver,Split Phase Motor A2,Motor Control Board
Ningbo Zhenhai Rongda Electrical Appliance Co., Ltd. , https://www.centrifugalswitch.com