Health care services in developed countries have surpassed the hospital-centred model, focusing on primary and secondary care and not limited to hospitals. These initiatives have driven the development of telemedicine devices that are used outside the hospital and are often used by patients themselves.
The urgent need for telemedicine equipment is driving market growth. US wireless consumer medical device sales in 2010 reached $600 million, and is expected to reach $1.3 billion in 2011. However, it is still negligible compared to the annual sales of $200 billion in the global medical device market.
Operating system - key distinguishing elements
The operating system is a key distinguishing factor for all electronic medical devices, and manufacturers understand this very well. In fact, they often choose the operating system before choosing a board.
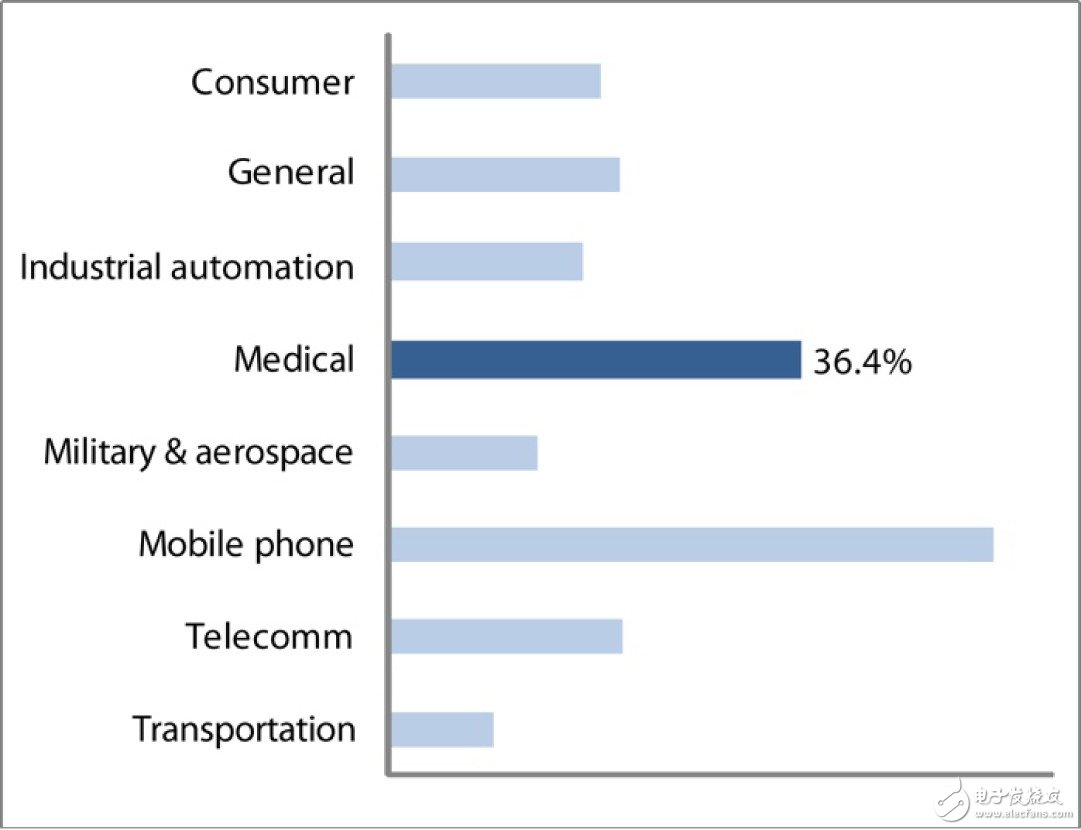
Figure 1 Ratio of projects that first select an operating system in different industries
The discussion in this article does not include consumer-grade medical devices, such as failures that do not have serious consequences. For devices that have serious consequences in the event of a failure, the key features of their operating system can be categorized as follows:
· Credibility: respond to events in a timely and correct manner within a defined time
· Connectivity: Communicate directly with different devices and systems over the network
· Data integrity and security: securely store data and prevent unauthorized access
Each of the above features is worthy of in-depth discussion, and here we only focus on one of the most important features - credibility.
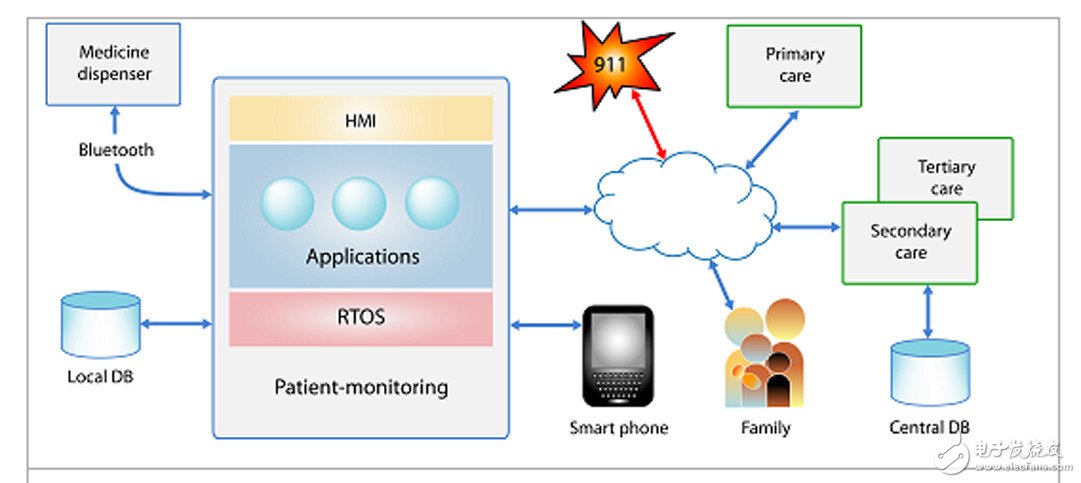
Figure 2 A simple remote patient monitoring network
Choose GPOS or RTOS?
Credibility combines usability and reliability into one. Availability requires the system to respond to the probability of the request in a timely manner, and reliability indicates the correct rate of response. The requirement for a reliable operating system is to exclude the use of the Generic Operating System (GPOS) because GPOS does not provide strict availability and reliability.
In contrast, the real-time operating system (RTOS) itself is designed to ensure availability and reliability. Designers can rely on real-time operating systems to respond to the availability of requirements and the reliability of tasks as required. Therefore, it can be concluded that most medical devices require a real-time operating system.
Real-time operating system architecture
Even a simple device like a dispensing machine is not allowed to malfunction. If the fault causes data corruption, the dispenser may change the dose, and the final serious consequences can be imagined. Since the operating system architecture has a significant impact on the reliability of the system, it should first be rigorously evaluated. The three most common architectures for real-time operating systems are real-time execution, macro cores, and microkernels.
Real-time execution architecture
Based on the real-time execution architecture, all software components, including the kernel, network stack, file system, drivers, and applications, all run in the same memory address space. Although this architecture is efficient, it has two obvious drawbacks. First, a single pointer error within any module can corrupt the memory used by the kernel or any other module. Second, no diagnostic information is left after the system crashes.
Macro kernel architecture
Some real-time operating systems address memory errors that can cause system failures through a macro-kernel architecture in which programs can run as memory-protected processes. This architecture does prevent user fault codes from damaging the kernel. However, the kernel components still share the same address space as other services. Therefore, a single programming error in any service can cause the entire system to crash.
Microkernel architecture
In the microkernel real-time operating system, device drivers, file systems, network protocol stacks, and applications run in separate address spaces outside the kernel, so they are not only isolated from the kernel, but also independent of each other. Failure of one component does not cause the entire system to crash, and memory failures in the component do not affect other processes or the kernel. This way, the operating system can automatically restart the failed component.
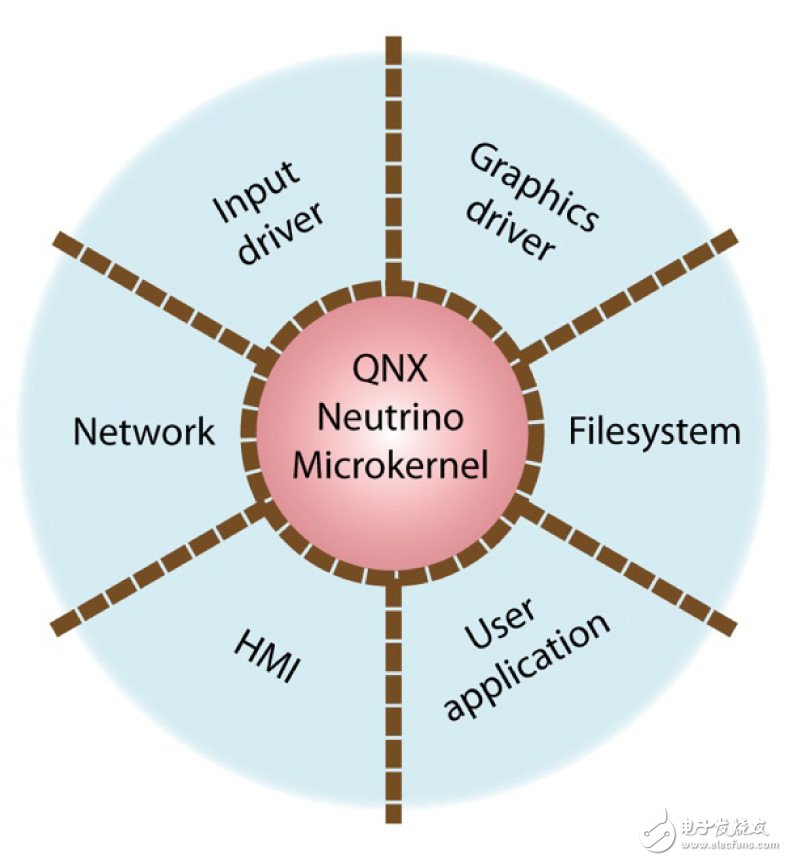
Figure 3 Microkernel operating system in the patient monitoring system
Key features of real-time operating systems
Among the many operating system features, in addition to the system architecture must be carefully evaluated, other important features include:
· Ensure real-time
· Prevent priority inversion
· Ensure availability
· Monitor and restart processes
Ensure real-time performance
For all systems that need to ensure real-time performance, a preemptive kernel is critical. For example, an alarm triggered when a patient falls should be able to preempt the process and issue an alarm.
In order to ensure that the high-priority process gets the required CPU cycles at any time, the kernel of the real-time operating system needs to be preemptively run. In addition, the design of the kernel must be as simple as possible to ensure that the longest non-preemptable code path has an execution time limit. . As long as the operating system's kernel can allocate task-intensive operations to external processes or threads, and only include short-path services, this simplicity can be implemented in the operating system kernel.
6-9V Lithium Manganese Battery
Jiangmen Hongli Energy Co.ltd , https://www.honglienergy.com