1 Overview
Distributed Control Systems (DCS) and Fieldbus Control Systems (FCS) have evolved to a fairly mature level, but they still have drawbacks and deficiencies. Therefore, it is necessary to establish a networked measurement and control system with good flexibility, system reconstruction capability, fault tolerance and rapid response. Distributed artificial intelligence technology (DAI), Agent theory, fieldbus and single bus integration technology provide a practical and effective way to design and implement such a system.
Based on this point, this chapter proposes an intelligent data acquisition system based on Lonworks fieldbus technology. In this system, each measurement and control unit is constructed as an agent with autonomy and self-adaptive ability, which improves the reliability, stability and work efficiency of the whole system through the collaborative work between multiple agents. In this way, the fieldbus measurement and control system has the characteristics of information perception, distribution, concurrency, initiative and adaptability.
Recently, Agent technology has been considered as an important method for modeling distributed industrial systems. It is the most natural means of designing and implementing a distributed intelligent measurement and control environment, and is one of the important technologies for building a next-generation measurement and control system.
2. The system's multi-agent model
The system is mainly composed of three parts: system management agent, control agent and perception and execution agent. They are all independent or semi-autonomous entities with independent working ability. They cooperate to complete the tasks assigned to it or their tasks, which constitutes a concurrency. Distributed MAS (MulTI-AgentSystem) system. In fact, the detection and monitoring system in the MAS environment should be an agile multi-agent system. Due to the different decomposition and allocation of tasks and other unpredictable factors, this multi-agent system can change the organization configuration at any time. The reconstruction of the system is achieved, and once the mission is over, the temporarily formed system is immediately disbanded. Based on the above ideas, Figure 1 defines the distributed system model from the composition and communication methods of the system. In this system, the management agent is a comprehensive state recognition system, which completes the monitoring of the overall operating state of the system and provides real-time monitoring, evaluation and decision-making functions for each monitoring object.
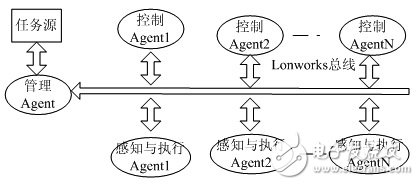
Figure 1 system structure
The control agent and the perception and execution agent are agents with autonomy and self-adaptive ability, but there is no strict one-to-one correspondence between them. Instead, the management agent temporarily convene a dynamic node agent according to the needs of the task. Among them, the perception and execution agent is an intelligent device running on the control site, which is the main source of information when the management agent performs the task, and is also the basic embodiment of the agent's perception ability. They are responsible for the acquisition and pre-processing of the live signals, extracting the characteristics of the sensor signals to form monitoring variables, and determining where the signals are sent. At the same time, the Agent receives the command from the control agent and converts it into a switch quantity and analog output that match the field device. The control agent is the core component of the system and has the ability of self-determination. In addition, in this multi-agent system, the source of the task is multifaceted. It can be either a command from a certain control level or a collaborative request from a management agent in another multi-agent system.
3, the system work process
Under normal circumstances, the working process of the system is shown in Figure 2.
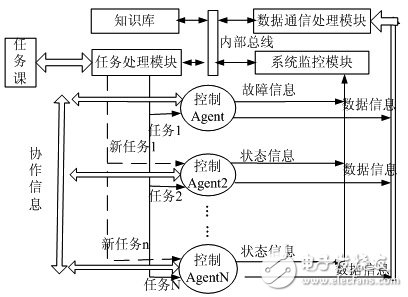
Figure 2 system working principle diagram
After the task from the task source is transmitted to the management agent, the task processing module first decomposes the task, and then queries the knowledge base to query whether the managed control agent can complete all the sub-tasks after the decomposition. If it can be done, the task is assigned and the system is started; if it cannot be completed, the execution of the task is abandoned and the task source is notified. After the system is started, the control agent summons the relevant perception and execution agents to process the tasks assigned to them, and realizes the cooperation with other control agents and the sharing of information and resources through its own interaction mechanism. When a control agent fails, the monitoring module of the management agent first makes a corresponding diagnosis decision based on the detected fault information, and then notifies the task processing module to transfer the control authority of the control agent to another control agent or perform a task re-request. Assigned so that the entire system is still functioning. This enables the collaboration between agents to improve the reliability of the entire system, rather than the reliability of individual devices and the redundancy of key components.
4, the hardware structure of the system
This paper uses fieldbus as the communication platform of the system to build an open, interoperable real-time fieldbus data acquisition system. The specific scheme for realizing the measurement and control system is as follows:
Taking into account the requirements of the system to reduce costs, combined with the characteristics of the existing bus control system, the author uses the on-site measurement and control equipment, Lonworks node and its network equipment to form an on-site measurement and control network. Here, we only need to add a Neuron chip to each module when designing each agent. The communication line only needs ordinary twisted pair cable, so that any communication between the agents can be realized. At the same time, the MCU system is used as the hardware support, and the MCS51 language is used as the software development tool to make it correspond to the new sensor and actuator to form the corresponding intelligent agent. It mainly completes the basic control of the measurement and control object, collects the required monitoring information through the temporary site node, performs the perceptual processing, and transmits it to the management agent through the bus for overall data analysis, processing and fault diagnosis. The dynamic node agent follows the Lontalk protocol and uses network variables to implement the connection of each node. Data communication between nodes uses window protocol to display messages for data transmission, and is managed by network variables. This realizes mutual operation between node agents and uses KQML-like communication mode to realize information and knowledge sharing between agents. .
4.1 Control Agent
The main function of the control agent is to complete its own control algorithm, and form a dynamic multi-agent cooperation system with other agents according to the task needs. The control commands and data required to control the Agent are transmitted through the Lon bus. The Control Agent only comes with a Lonworks interface chip and an external extended EZPROM, without any other peripherals.
In this paper, the neuron chip TMP3150 and AT89c51 single-chip microcomputer are connected to form the Lon bus interface circuit, and parallel communication is adopted between the two. The P0 port of the AT89c51 and the IO0~IO7 of the 3150 are connected as the 8-bit data bus; the P3.2 of the AT89c51 is connected to the IO8 of the 3150, as the signal line of the MCU requesting to send data and the answer line receiving the 3150 control command; P3. 3 is connected to IO9 as a response signal line for receiving data from the neuron chip; P3.4 and I010. Connected, used as a signal line for the 3150 to send control commands. This selects P3.2 and P3.3. As a handshake signal, the strict synchronization between the MCU and the 3150 is guaranteed. At the same time, in order to avoid the system crash when it is disturbed, a delay is added to the microcontroller each time it waits for the response signal. If the response signal has not been received at the end of the delay, the microcontroller will jump to the initial state. The circuit principle of the Agent is shown in Figure 3:
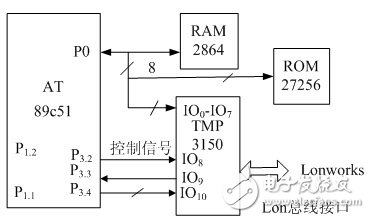
Figure 3 control schematic
4.2 Perception and execution of Agent
The agent not only can complete the signal acquisition, but also can preprocess the sensor signal, extract the characteristics of the sensor signal to form the monitoring variable, and transmit it to the control agent through the Lonworks interface. At the same time, it is also the signal output interface of the controller node, which is responsible for receiving control commands from the control agent and converting them into control quantities or switch outputs that match the field devices.
In order to achieve direct acquisition of field data, the author uses a new single-bus digital temperature sensor as a field measurement device. The single-bus digital sensor eliminates the need for channel switching, A/D conversion, and result correction in measurement, and can directly output digital signals, making the system structure simpler and more reliable. At the same time, the TMP3150 is used to construct the Lon bus interface circuit. The circuit principle is shown in Figure 4:
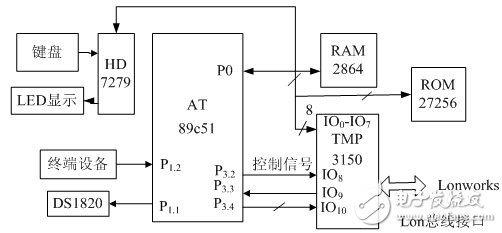
Figure 4 Schematic diagram of sensing and executing Agent
5, summary
The intelligent data acquisition system based on Lonworks bus technology designed in this paper has the following advantages:
(1) Different from the existing control system to improve the reliability of the whole system through the reliability of a single device and the redundancy of key components, relying on cooperation between various intelligent agents to improve reliability.
(2) The entire control system is intelligent in dealing with abnormal emergencies such as system failures.
(3) The performance of the system, such as reliability and speed, can be very scalable.
24V Dc Controller,48V Dc Controller,Dual Channel Controller,Dual Channel Dc Controller
Jinan Keya Electron Science And Technology Co., Ltd. , https://www.keyaservo.com