In the train control system of high-speed railways, CAN communication failures often occur due to the long communication distance, but the causes and principles of the faults are unknown. What is the specific situation? Let's take a high-speed rail as an example for detailed explanation.

With the gradual improvement of people's life rhythm, the distance between the region and the region is no longer a problem, which is due to the vigorous development of the transportation industry. Among them, the high-speed rail as a leader in the transportation industry, he also has a wide range of people. Recognition. Because of this, the communication problems in the high-speed rail have also been highly valued by various equipment suppliers and railway companies. They cannot tolerate this kind of mistake because it is closely related to the safety of every traveler and train personnel. The following is a brief example of a high-speed rail communication problem.
First, the bus delay causes
The CAN bus mainly restricts its transmission distance. Since the body of the high-speed train has a long communication point, it will cause delay in data transmission and response. Wires are delayed in transmitting data, typically with a typical delay of 5 ns/m, while different isolation devices can also cause different delays. It is also related to the wire material (gold-plated 0.2 square meters equivalent to 1.0 square meters of copper wire), CAN transceiver and isolation mode, for example: the optocoupler isolation delay is much larger than the magnetic coupling isolation.
If the resynchronization of CAN does not compensate for the delay generated in the transmission, the bit width of the response delimiter will become larger, eventually leading to the recognition delimiter identifying the error during the recognition process, and identifying the recessive level as dominant. Flat, a delimiter error occurred. As shown in Figure 1:
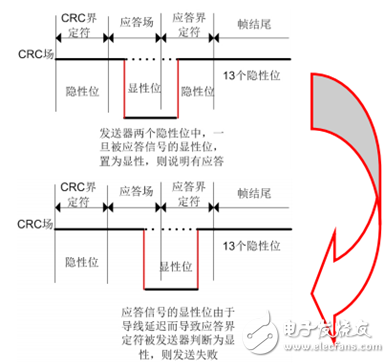
Chart 1 delay error
Second, the result of delay error
The following types of delay errors have occurred in a high-speed railway:
The types of errors detected this time mainly include: response delimiter error, delimiter format error, and frame end format error. They are all caused by delay errors. The following has answered the delimiter error as an example:
u response delimiter error
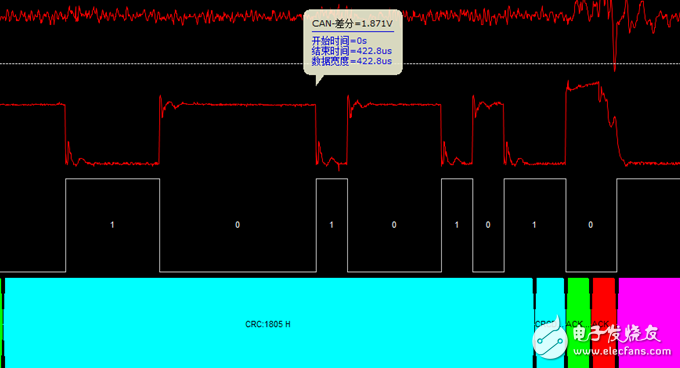
Chart 2 response delimiter error
From the data we can see that the response delimiter should be a recessive level, but the response delimiter is always in a dominant state due to the delay in the transmission response, which results in an error in the format of the response delimiter.
Third, how to detect the transmission delay
First of all, in order to detect the CAN bus delay error, there must be a corresponding CAN bus analyzer. The following is an example of the CANSCOPE detection method of Guangzhou Zhiyuan Electronics:
1) Delay analysis
In order to locate the fault point faster, we must first analyze the delay of the entire communication process to find out where the delay exists. According to the "transmission delay" in CANSCOPE, the delay is arranged in the order of delay from large to small, bounded by 0.245 times the bit width, beyond which the risk can be defined as a response error.
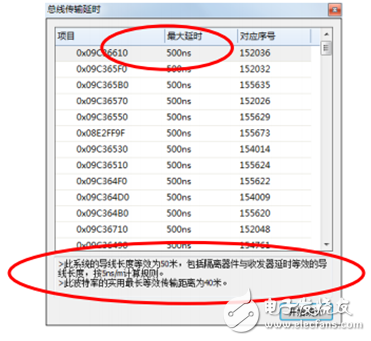
Figure 3 Delay statistics and equivalent wire length
Since the nodes attached to the bus are different from the test points, the delays caused are different. In order to detect the maximum delay of the bus, we usually put the test point at the farthest end of the bus, and the test object is also the message sent by the two nodes at the farthest ends of the bus.

Figure 4 Delay measurement
We can assume that the message is sent from the leftmost host, so the farthest slave far from him is the far right, then the maximum delay is: the overall wire delay + the circuit delay of the farthest node (ie the rightmost end) ( Includes isolation device and transceiver delay).
Fourth, the method of eliminating delay error
In order to reduce the delay, increase the communication distance and reduce the communication error rate, we can take the following measures:
1. Design interface transceiver circuit using magnetically isolated CTM1051 solution;
2. Replace the thin wire with a thicker wire, the standard is 1.5 cable (delay 5ns / m);
3. Use gold-plated or silver-plated cables;
4. Increase the bridge relay device CANBridge to extend the communication distance.
5. Using optical fiber transmission, such as the CANHUB-AF1S1 of Zhiyuan Electronics, the same baud rate can be extended by 1 times.
V. Summary
In order to ensure the normal communication of the CAN bus, it is first necessary to ensure that the CAN nodes are properly arranged, and that each message arriving at the node does not have a delay error. Secondly, a good analysis tool is also essential, which not only helps us to accurately and quickly Find out where the fault is, and test the condition of our bus in various environments in an analog way.
Auto Elevator,Elevator For Cars,Garage Car Elevator,Residential Car Elevator
XI'AN TYPICAL ELEVATOR CO., LTD , https://www.chinaxiantypical.com