introduction
In an autonomous walking robot system, if the robot is to walk in an unknown and uncertain environment, it must collect environmental information in real time to achieve obstacle avoidance and navigation. This must be achieved by a sensor system that can realize environmental information. Sensors such as vision, infrared, laser, and ultrasound are widely used in walking robots. Ultrasonic distance measuring method is widely used because of its simple equipment, cheap price, small size, simple design, easy to achieve real-time control, and can meet industrial practical requirements in measuring distance and measuring accuracy. The robot described in this article uses a three-party ultrasonic ranging system, which can provide information about the distance of movement for the robot to recognize the front, left, and right environments of its movement.
1 Principle of ultrasonic ranging
The ultrasonic generator consists of two piezoelectric plates and a resonance plate. When a pulse signal is applied to its two poles and its frequency is equal to the natural oscillation frequency of the piezoelectric wafer, the piezoelectric wafer will resonate and drive the resonance plate to vibrate, thus generating ultrasonic waves. Conversely, if no external voltage is applied between the two poles, when the resonance plate receives ultrasonic waves, it becomes an ultrasonic receiver. Ultrasonic distance measurement generally has two methods: â‘ take the average voltage value of the output pulse, the voltage is proportional to the distance, the distance can be measured by measuring the voltage; â‘¡ measure the width of the output pulse, that is, the time interval between transmitting and receiving ultrasonic waves, t, According to the measured distance s = vt? 2 to get the measured distance, because the ultrasonic speed v is related to temperature, so if the temperature change is relatively large, it should be corrected by means of temperature compensation.
This measurement system uses the second method, because the measurement accuracy requirements are not particularly high, so the temperature can be considered basically unchanged.
This system takes PIC16F877 single-chip microcomputer as the core, realizes its real-time control of the peripheral circuit through software programming, and provides the signals required by the peripheral circuit, including frequency vibration signals, data processing signals, etc., thereby simplifying the peripheral circuit and good portability . The block diagram of the system hardware circuit is shown in Figure 1.
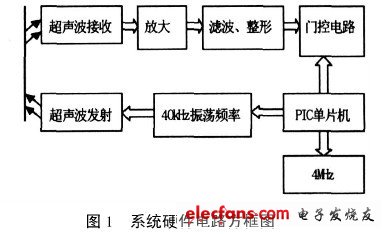
Since this system only needs to know whether there is an obstacle in front of the robot, on the left or on the right, and does not need to know the specific distance between the obstacle and the robot, there is no need to display the circuit, only need to set a distance threshold to make the obstacle When the distance of the robot reaches a certain value, the single-chip microcomputer controls the robot motor to stop, which can be realized by software programming.
2 Ultrasonic transmitting circuit
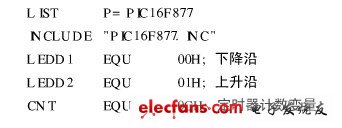
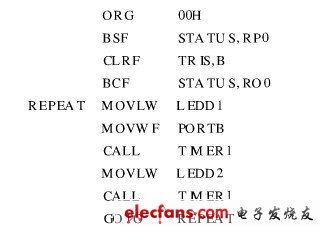
The center frequency of the ultrasonic wave is 40kHz, and this frequency can be generated by the following procedure (part of the source program):
Low Noise Machine Roomless Elevator
Roomless Elevator,Machine Room Less Lift,Machine Room Elevator,Low Noise Machine Roomless Elevator
XI'AN TYPICAL ELEVATOR CO., LTD , https://www.chinaxiantypical.com